- Inicio
- Sede
- Autores
- Comités
- Registro
- Apoyo de hospedaje a estudiantes
- Concursos
- Programa
- Talleres
- Plenarias
- Hoteles

Invitación al Congreso Nacional de Control Automático 2024
La Asociación de México de Control Automático (AMCA) tiene el placer de invitarlos al Congreso Nacional de Control Automático 2024 (CNCA 2024), que se llevará a cabo en el histórico y emblemático Palacio de Minería de la Facultad de Ingeniería de la Universidad Nacional Autónoma de México, en el corazón de la CDMX, del 8 al 11 de octubre de 2024.
El CNCA es el evento más importante en México en el campo del control automático, cuyo objetivo es fomentar el contacto entre académicos y tecnólogos para establecer nuevas redes de colaboración y fortalecer las existentes. Además, el CNCA brinda a jóvenes interesados en la automatización y disciplinas afines la oportunidad de presentar sus trabajos de investigación y desarrollo tecnológico ante una audiencia de expertos nacionales.
Año tras año, desde 2001, el CNCA se ha llevado a cabo con éxito en distintos escenarios de nuestro país. Cada edición del CNCA ha sido un marco perfecto para vivir experiencias únicas. Ha representado la primera incursión en congresos para muchos estudiantes de posgrado, la oportunidad de conocer a autores de libros de control, encontrar amigos, colaboradores, o simplemente estar en compañía del grupo más ecléctico de expertos en control en México.
Cada congreso nos ha dejado una marca distinta, incluido el CNCA 2023, que lamentablemente no pudo desarrollarse en su totalidad debido a la inesperada llegada del huracán Otis. Sin embargo, en medio de esta adversidad, fue la solidaridad de nuestra comunidad de control en México la que dejó una marca profunda.
Este año es especial, ya que el CNCA regresa a sus raíces, a la Ciudad de México, donde el 7 de noviembre de 1977 se fundó la AMCA. Este año, el CNCA se llevará a cabo en el Palacio de Minería, un verdadero símbolo de la ingeniería en América, que está bajo el resguardo de la Facultad de Ingeniería de la Universidad Nacional Autónoma de México (FIUNAM). Este recinto es uno de los más emblemáticos del Centro Histórico de la capital de nuestro país, y ha sido sede de varios proyecto educativos y culturales desde su construcción entre 1797 y 1813 por el arquitecto Manuel Tolsá.
Para la AMCA, es un honor celebrar, con el apoyo de la FIUNAM, su evento anual más importante en el Palacio de Minería. Es un privilegio que nuestra historia se entrelace con la del recinto que marca el inicio de la ingeniería en México. Pero, el mayor honor será recibir a tantos entusiastas del Control Automático en este lugar histórico, donde realizaremos nuestras actividades tradicionales y algunas sorpresas que, con mucho cariño, la AMCA ha preparado para ustedes.
¡Les esperamos en Tacuba 5!
Dra. Flor Lizeth Torres Ortiz
Presidenta de la AMCA
FECHAS IMPORTANTES
Inicio de recepción de artículos: 26 de marzo
Límite para recepción de artículos: 25 de junio (¡Última extensión!)
Límite para recepción de sesiones especiales: 25 de junio (¡Última extensión!)
Límite para recepción de artículos de sesiones especiales: 25 de junio (¡Última extensión!)
Publicación de resultados: 16 de agosto
Envío de versiones finales: 02 de septiembre
Límite para inscripción anticipadas: 12 de septiembre (¡Nueva fecha!)
Sede

El Palacio de Minería, una joya arquitectónica neoclásica ubicada en el Centro Histórico de la Ciudad de México, fue construido entre 1797 y 1813 por el arquitecto Manuel Tolsá para albergar el Real Seminario de Minería. Hoy en día, este imponente edificio es sede de la Facultad de Ingeniería de la UNAM, donde se imparten programas de estudio en diversas ramas de la ingeniería. Además de su función educativa, el Palacio de Minería es un importante centro cultural que alberga eventos académicos, exposiciones y conferencias, contribuyendo así a preservar su legado histórico y promover la innovación en el ámbito de la ingeniería y las ciencias.
Los autores están invitados a someter trabajos completos y originales a través del sistema PaperCept (https://controls.papercept.net/conferences/scripts/start.pl).
Los trabajos aceptados serán publicados en las Memorias del Congreso Nacional de Control Automático con ISSN: 2594-2492.
Les solicitamos atentamente que en la preparación de la versión final de su trabajo tome en cuenta los comentarios de los revisores (que fueron enviados por correo electrónico y que también puede consultar ingresando en el sistema PaperCept ).
Para que los trabajos puedan ser publicados en la Revista Digital “Memorias del Congreso Nacional de Control Automático”, deben cumplir con los siguientes requisitos:
● Preparación de acuerdo a los lineamientos para congresos IFAC:
IFAC LaTeX package (Letter size)
IFAC Word package (Letter size)
● Extensión máxima de seis (6) páginas.
● Idioma: Español o Inglés.
● MUY IMPORTANTE: El título, resumen y palabras clave deben estar escritos en inglés (con la finalidad de indexar las memorias en Scopus).
La versión final debe enviarse a través de la plataforma PaperCept:
https://controls.papercept.net/conferences/scripts/start.pl
Si el artículo es aceptado, al menos uno de sus autores debe asistir al congreso y presentar el trabajo según la programación decidida por el Comité Técnico del Programa.
Para que el artículo se considere en el Programa Técnico, al menos uno de los autores mencionados en el artículo debe registrarse al CNCA 2024 . En caso de que ningún autor pueda asistir al congreso, es responsabilidad de los autores asegurarse de que el artículo sea presentado por un colega calificado.
En caso de tener problemas con los márgenes con su archivo en LaTeX, pruebe con este "documentclass"
documentclass[letterpaper]{ifacconf}
Y añada este paquete y modificación de márgenes:
usepackage{vmargin}
setpapersize{USletter}
setmarginsrb{0.556 in}{ 0.55 in}{ 0.875 in}{0.0 in}{0.4 cm}{0.4cm}{1 cm}{1.5 cm}
Comité Técnico
Presidenta de Programa
Dra. Gloria Lilia Osorio Gordillo
Vicepresidente de Programa
Dr. Rodolfo Amalio Vargas Méndez
Editores Asociados
Luis Néstor Coria de Los Ríos – TecNM / Instituto Tecnológico de Tijuana
Jesús Álvarez Calderón – Universidad Autónoma Metropolitana – Iztapalapa
Carlos Daniel García Beltrán – TecNM / Centro Nacional de Investigación y Desarrollo Tecnológico
Héctor Ríos – CONACyT – TecNM / I. T. de La Laguna
Efraín Alcorta García – Facultad de Ingeniería Mecánica y Eléctrica – UANL
Emmanuel Nuño Ortega – Centro Universitario de Ciencias Exactas e Ingeniería – UdeG
Esteban Abelardo Hernández Vargas – Instituto de Matemáticas – UNAM
Fernando Castaños – Centro de Investigación y de Estudios Avanzados – IPN
Francisco Javier Bejarano – Escuela Superior de Ingeniería Mecánica y Eléctrica – IPN
Gerardo Vicente Guerrero Ramírez – TecNM / Centro Nacional de Investigación y Desarrollo Tecnológico
Héctor Fernando Puebla Núñez – Universidad Autónoma Metropolitana – Azcapotzalco
César Cruz Hernández – Centro de Investigación Científica y de Educación Superior de Ensenada
José Francisco Gómez Aguilar – TecNM / Centro Nacional de Investigación y Desarrollo Tecnológico
Flor Lizeth Torres Ortiz – Universidad Nacional Autónoma de México – Instituto de Ingeniería
Paul Rolando Maya Ortiz – Facultad de Ingeniería – UNAM
René Galindo Orozco – Facultad de Ingeniería Mecánica y Eléctrica – UANL
Salvador Hernández Castro – Universidad de Guanajuato
Rafael Maya Yesca – Universidad Michoacana de San Nicolás de Hidalgo
Ricardo Aguilar López – CINVESTAV CDMX
Juan Paulo García Sandoval – Universidad de Guadalajara
José Fermi Guerrero Castellanos – Benemérita Universidad Autónoma de Puebla
Guillermo Valencia Palomo – TecNM / Instituto Tecnológico de Hermosillo
Francisco Ronay López Estrada – TecNM / Instituto Tecnológico de Tuxtla Gutiérrez
Ulises Badillo – Universidad Autónoma Metropolitana – Iztapalapa
Samuel Gómez Peñate – TecNM / Instituto Tecnológico de Tuxtla Gutiérrez
Ildeberto de los Santos Ruiz – TecNM / Instituto Tecnológico de Tuxtla Gutiérrez
Héctor Ricardo Hernández de León – TecNM / Instituto Tecnológico de Tuxtla Gutiérrez
Omar Hernández Gonzalez – TecNM / Instituto Tecnológico de Hermosillo
María Eusebia Guerrero Sánchez – TecNM / Instituto Tecnológico de Hermosillo
Víctor Estrada Manzo – Universidad Politécnica de Pachuca
Nohé Cazarez Castro – TecNM / Instituto Tecnológico de Tijuana
Gerardo Flores Colunga – Centro de Investigaciones en Óptica
Betty López Zapata – Universidad Politécnica de Chiapas
Marcos Ángel González Olvera – Universidad Autónoma de la Ciudad de México
Hugo Rodríguez Cortés – Centro de Investigación y de Estudios Avanzados – IPN
Alejandro Gutiérrez Giles – Instituto Nacional de Astrofísica, Óptica y Electrónica
Sofía Ávila Becerril – Facultad de Ingeniería – UNAM
Roberto Giovanni Ramírez Chavarría – Universidad Nacional Autónoma de México – Instituto de Ingeniería
Eduardo Aranda Bricaire – Centro de Investigación y de Estudios Avanzados – IPN
Elvia Ruth Palacios Hernández – Universidad Autónoma de San Luis Potosí
Ricardo Álvarez Salas – Universidad Autónoma de San Luis Potosí
Martín Velasco Villa – Centro de Investigación y de Estudios Avanzados – IPN
Martha Belem Saldivar Márquez – Centro de Investigación y de Estudios Avanzados – IPN
Sabine Mondié Cuzange – Centro de Investigación y de Estudios Avanzados – IPN
Alejandro Vargas Casillas – Universidad Nacional Autónoma de México – Instituto de Ingeniería
Alejandro Dzul López – TecNM / Instituto Tecnológico de la Laguna
Juan Gonzalo Barajas Ramírez – Instituto Potosino de Investigación Científica y Tecnológica
Jorge Ángel Dávila Montoya – Instituto Politécnico Nacional
Luis Alejandro Márquez Martínez – Centro de Investigación Científica y de Educación Superior de Ensenada
J. Francisco Márquez-Rubio – Instituto Politécnico Nacional
Rocio Jasmin Vazquez Guerra – Instituto Politécnico Nacional
Alma Alanís García – Universidad de Guadalajara
Arturo Zavala Río – Instituto Potosino de Investigación Científica y Tecnológica
Basilio del Muro Cuéllar – Instituto Politécnico Nacional
Daniel Campos Delgado – Universidad Autónoma de San Luis Potosí
Daniel Alejandro Melchor Aguilar – Instituto Potosino de Investigación Científica y Tecnológica
Efraín Alcorta García – Universidad Autónoma de Nuevo León
Dunstano del Puerto Flores – Universidad de Guadalajara
Fernando López-Caamal – Universidad de Guanajuato
Hoover Mujica Ortega – Facultad de Ingeniería – UNAM
Janeth Alcalá Rodríguez – Universidad de Colima
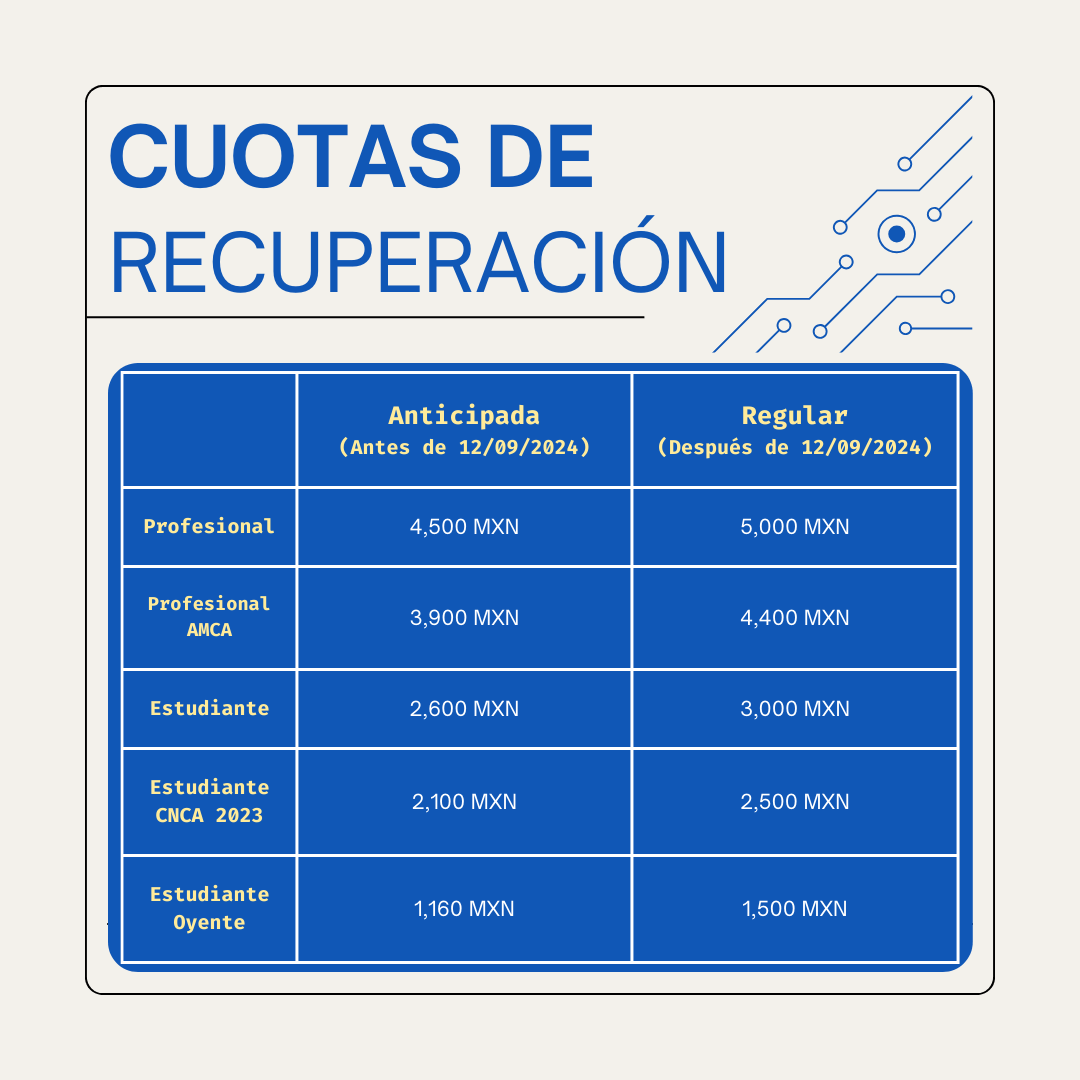
Categorías
Profesional: Persona sin membresía dedicada a la docencia a nivel superior, la investigación o cualquier actividad en el sector público y/o privado.
Profesional AMCA: Persona con membresía vigente en AMCA dedicada a la docencia a nivel superior, la investigación o cualquier actividad en el sector público y/o privado. La membresía vigente incluye a todos los que pagaron la inscripción al CNCA 2023, así como a aquellos que pagaron la cuota de membresía.
Estudiante: Estudiante con artículo aceptado.
Estudiante CNCA 2023: Estudiante con artículo aceptado que se haya inscrito al CNCA 2023.
Estudiante oyente: Estudiante sin artículo.
Nota: Este año se ofrece un descuento especial a los participantes, tanto profesionales como estudiantes, que se inscribieron al CNCA 2023, el cual no pudo llevarse a cabo debido al huracán Otis.
Beneficios del pago
1. Inscripción profesional: La inscripción profesional permite publicar hasta dos trabajos en las memorias del congreso, participar en las pláticas, disfrutar del coffee break, recibir un kit de souvenirs (que incluye mochilas, herramientas y USBs), asistir al brindis, obtener una membresía de la AMCA por un año y participar en la cena de gala en el Hotel Ritz del centro histórico de la Ciudad de México.
2. Inscripción estudiante y estudiante CNCA 2023: Estas inscripciones permiten publicar un trabajo en las memorias del congreso, incluyen acceso a las pláticas y al coffee break, participación en las pláticas, recepción de un kit de souvenirs (que incluye mochilas, herramientas y USBs), una copa de cortesía en el brindis del miércoles 9 de octubre, opción a solicitar apoyo para hospedaje, participación en concursos y la oportunidad de presentar un artículo. No incluyen acceso a la cena de gala programada para el 10 de octubre; sin embargo, se puede asistir a la cena pagando una cuota de recuperación adicional.
3. Inscripción estudiante oyente: Esta modalidad de inscripción sólo incluye acceso a las pláticas y al coffee break.
4. Publicación adicional para inscripción profesional: La inscripción profesional permite la publicación de un trabajo extra con un costo adicional de 1,200.00 MXN.
5. Trabajos con más de seis páginas: Los trabajos que excedan seis páginas estarán sujetos a un cargo adicional de 600.00 MXN por cada página extra, el cual deberá ser pagado junto con la inscripción de alguno de los autores.
6. Inclusión en el programa: Los trabajos aceptados solo se incluirán en el programa si al menos uno de los autores se inscribe antes del 12 de septiembre de 2024 (¡Fecha extendida a petición de los miembros de la AMCA!).
Procedimiento para el pago
El pago de la inscripción se podrá realizar a través de la siguientes modalidades:
● Depósito en la cuenta de la AMCA, ya sea en ventanilla o transferencia interbancaria (inscripciones, trabajos adicionales y páginas adicionales).
Banco: BBVA Bancomer
No. de Cuenta: 0172834464
A nombre de: Asociación de México de Control Automático
CLABE: 012180001728344641
CONCEPTO: CNCA24 XXX (XXX corresponde a su número de manuscrito). Si no tiene manuscrito el concepto será CNCA24 SIN.
● Pago por medio de PayPal utilizando el siguiente botón (requiere contar con una cuenta de PayPal, solo inscipciones)
PAYPAL – CUOTA REGULAR
Registro
Una vez que haya realizado el pago, es necesario que llene el formulario de registro al evento. No olvide guardar su comprobante en formato PDF. En caso de ser estudiante, deberá adjuntar un comprobante de su condición de estudiante en el mismo archivo PDF.
En caso de requerir facturación, se proporcionan los campos necesarios en el formulario. Las facturas se generan dentro de un plazo de tres a cuatro días hábiles y se envían desde el sitio factura360.com al correo registrado. Si tras este tiempo no ha recibido la factura, revise por favor su carpeta de correo no deseado.
Políticas de devolución
Si un autor ha subido en PaperCept un artículo utilizando su registro pagado, la inscripción no será devuelta, incluso si el artículo se retira o que el autor no puede asistir al congreso.
Todas las solicitudes de cancelación o reembolso deben hacerse por escrito al presidiente del congreso, quien las canalizará al tesorero para ser procesadas, las cuales se procesarán de la siguiente manera:
● Las solicitudes recibidas antes del 10 de Septiembre de 2024 serán atendidas y se reembolsarán los derechos de inscripción, menos $ 600.00 pesos, por concepto de gastos de administración.
● Las solicitudes recibidas del 11 al 15 de Septiembre de 2024 recibirán un reembolso del 50%, por concepto de gastos de administración.
● No se darán reembolsos para las solicitudes recibidas después del 15 de Septiembre de 2024
Información de contacto
Solicitud de devoluciones: Presidenta del Congreso – presidente@amca.mx
Para la edición 2024 del CNCA, la AMCA ofrece apoyo de hospedaje a los estudiantes inscritos al Congreso que así lo requieran y que se comprometan a ser quienes presenten su trabajo en el CNCA 2024. No se ofrecerá apoyo a quienes no tengan un trabajo registrado, a quienes no sean estudiantes o se hayan registrado solamente como estudiante oyente.
El hospedaje será en habitación compartida con otros estudiantes, en cuartos con ocupación únicamente masculina o femenina, según sea el caso.
El número de apoyos es limitado, y se asignarán en el orden que sean recibidos. De ser asignado el apoyo, se compromente a apoyar dentro de la logística del congreso, en caso de requerírsele. Tras el llenado de este registro, el comité evaluará las solicitudes y le pedirá confirmación del apoyo por medio de correo electrónico.
Tras el llenado, recibirá un correo electrónico con los datos que registre. De clic nuevamente en “Apoyo de hospedaje a estudiantes" para comprobar los datos ingresados.
Aviso: El formato de registro se abrirá el viernes 6 de septiembre a las 14:00 hrs (hora del centro) en esta misma página. Tenga listo su comprobante de pago al CNCA 2024 como estudiante (no estudiante oyente), así como una digitalización de un comprobante de inscripción a su institución (credencial, tira de materias, registro de tesis de licenciatura).
Análisis estadístico básico con R
Dra. Elvia Ruth Palacios Hernández
La estadística, en pocas palabras, describe una variedad de métodos para recopilar, organizar, analizar y reportar datos cuantitativos. Debido a que las estadísticas se centran en datos cuantitativos, los datos en este caso suelen estar en forma de números. Por lo tanto, podemos entender el análisis estadístico en la investigación como un enfoque sistemático y probado para analizar datos numéricos de modo que podamos maximizar nuestra comprensión de lo que nos dicen los números. Es una forma numérica de análisis en un trabajo de investigación.
La razón principal es que, si bien a menudo es imposible estudiar todo un conjunto de objetivos, normalmente es posible estudiar una pequeña muestra de ese conjunto. Los métodos de análisis estadístico tienen en cuenta las variaciones y las diferencias, y es por eso por lo que son tan críticos para realizar un análisis de investigación de alta calidad.
Por otro lado, R es un lenguaje y un entorno de programación diseñado originalmente para hacer cálculos y gráficos estadísticos, similar al lenguaje S desarrollado por los Bell Laboratories y comercializado como S Plus. Como es de esperar, R tiene integradas, entre otras, funciones relacionadas con el análisis exploratorio de datos, distribuciones de probabilidad, estimación de parámetros y pruebas de significación, análisis de regresión y análisis de la variancia. R ofrece un lenguaje interpretado de programación que puede usarse en forma interactiva, o bien ejecutando archivos de órdenes desde una terminal o desde una interfaz gráfica de usuario (GUI, en inglés). Este taller se apoyará en numerosos ejemplos de programación en R que permitirán estar en contacto de manera experimental y lúdica con estos conceptos de estadística que cada día es de mayor relevancia en la investigación con modelos cuantitativos y de data learning.
Temario
1. Terminología y conceptos básicos de la estadística
2. Una guía corta del software libre R
3. Análisis exploratorio de datos univariados
Requisitos:
1. Traer laptop y descargar e instalar según su sistema operativo, el software libre R en https://cran.r-project.org

Control por modos deslizantes
Jorge Ángel Dávila Montoya
Este curso tiene como objetivo presentar una introducción al diseño de controladores por modos deslizantes. A través de este curso, el estudiante comprenderá los principales conceptos del control por modos deslizantes. Además, algunas técnicas de diseño serán descritas a profundidad, y se explicarán sus ventajas y limitaciones.
Tema 1: Introducción al control por modos deslizantes
(a) Conceptos principales del control por modos deslizantes.
(b) Evitación del chattering: atenuación/supresión.
(c) Ecuación del modo deslizante.
(d) Condición de acoplamiento y propiedades de insensibilidad.
(e) Observador/diferenciador por modos deslizantes.
(f) Seguimiento de salida.
Tema 2: Modos deslizantes convencionales
(a) Solución de Filippov.
(b) Concepto de control equivalente.
(c) Diseño de superficie deslizante.
(d) Forma regular.
(e) Ubicación de valores propios.
(f) Minimización cuadrática.
Tema 3: Técnicas de diseño.
(a) Diseño de control de relevador con retroalimentación de estado.
(b) Control de vector unitario con retroalimentación de estado.
(c) Diseño de hiperplano basado en salida.
Tema 4: Observadores de modo deslizante (tema que se daría si existe tiempo suficiente).
(a) Observadores por modos deslizantes estándar.
(b) Control basado en observadores.
(c) Efecto del ruido.
(d) Efecto de discretización.
El alumno debe saber inglés, preferentemente, debido a que el material visual se encuentra elaborado en ese idioma. Así mismo, debe contar con conocimientos de control clásico y preferentemente de sistemas lineales, ya que el sistema está orientado principalmente al control de sistemas lineales.

Registro a los Talleres CNCA 2024
Dr. Chetan S. Kulkarni
NASA
Chetan S. Kulkarni es investigador en el Centro de Investigación Ames de la NASA. Sus intereses de investigación actuales son el desarrollo de modelos basados en la física, prognóstico de sistemas electrónicos, sistemas de energía y sistemas terrestres de exploración, así como sistemas híbridos.
Completó su Maestría (’09) y Doctorado (’13) en la Universidad Vanderbilt, TN, donde fue Asistente de Investigación de Posgrado en el Instituto de Sistemas Integrados de Software y en el Departamento de Ingeniería Eléctrica e Informática. Completó su Licenciatura (’02) en la Universidad de Pune, India. Antes de unirse a Vanderbilt, fue Investigador Asociado en el Departamento de Ingeniería Eléctrica, IIT-Bombay, donde su trabajo de investigación se centró en el desarrollo de dispositivos de monitoreo y control de sistemas de automatización de subestaciones de bajo costo y descarga parcial de transformadores de alta tensión. Anteriormente, fue miembro del equipo técnico del grupo de Automatización de Energía en Honeywell, India, donde estuvo involucrado en proyectos de automatización de energía llave en mano y desarrollo de productos en automatización de subestaciones.
Es KBR Technical Fellow, miembro de la Sociedad PHM y Miembro Asociado de AIAA. Editor Asociado de revistas IEEE, SAE, IJPHM sobre temas relacionados con Prognóstico y Gestión de la Salud de Sistemas. Ha sido copresidente del Comité Técnico del Programa en PHME18, PHM 20-24.
Fault Detection, Prognostics, Decision Making in Complex Systems
9 de octubre de 2024, 10:00 a.m.
Auditorio Bernardo Quintana
The airspace is about to be revolutionized by a silent swarm of electric aircraft vehicles. This is the future of aeronautics, with electric Vertical Take-Off and Landing (eVTOL) vehicles buzzing through the low-altitude airspace for both commercial deliveries and passenger transportation. To ensure the safety of this busy airspace, incredibly precise systems for health management will be crucial. These systems won’t just passively monitor the health of the aircraft, but actively predict potential failures before they happen. This will be essential not only to maintain or even surpass current aviation safety standards, but also to optimize maintenance schedules and pave the way for truly autonomous decision-making by the UAMs themselves. With these advanced health management systems, the entire urban air mobility network will be more resilient to unexpected disruptions, keeping the airspace safe and efficient.
The key to solving the prediction problem lies in understanding the aircraft’s current health status in real-time. This allows us to shift from fixed maintenance schedules to “condition-based" predictions, where maintenance is performed when truly necessary based on the vehicle’s health status. To accurately predict the future health of any complex system, we need two things: a clear picture of its current health condition and a good understanding of how it will be used in the future (flight patterns, weather conditions, etc.).
This hybrid approach using H-PINNs is particularly well-suited for the challenges faced by electric aircraft propulsion systems. These systems are complex, constantly evolving, and operate under a variety of environmental conditions. H-PINNs offer the potential to create accurate and adaptable models for predicting the health of these systems, paving the way for safer, more efficient, and more reliable electric aircraft.
This research proposes a new framework for predicting the health of complex systems, especially those critical for safety, like electric aircraft propulsion systems. It combines two powerful tools:
• Physics-based performance models: These models are essentially digital representations of the system that capture the fundamental physical laws governing its behavior.
• Deep learning algorithms: Deep learning is a type of artificial intelligence that excels at uncovering hidden patterns in large datasets.
Imagine the physics-based model as a blueprint, outlining the basic principles of the system. However, this blueprint may have some missing modeling pieces or uncertainties. This is where deep learning comes in. By analyzing real-world data from available sensors on the vehicle, the deep learning algorithms can fill in these gaps and identify subtle patterns to learn the degrading parameters that might indicate potential problems.

Dr. Luis Agustín Álvarez-Icaza Longoria
Instituto de Ingeniería, UNAM
Luis Agustín es Ingeniero Mecánico Electricista y Maestro en Ingeniería Eléctrica de la Facultad de Ingeniería, UNAM. Es Doctor en Ingeniería Mecánica por la Universidad de California en Berkeley, donde también realizó una estancia postdoctoral. Actualmente es Investigador Titular C de tiempo completo en el Instituto de Ingeniería. Nivel D en el PRIDE y Emérito en el SNII. Ha publicado más de 60 artículos en revistas indizadas (JCR), 100 artículos en extenso en memorias de congresos internacionales indizadas, más de 100 artículos en extenso en otros congresos y más de 50 informes y reportes técnicos. Sus trabajos han sido citados más de 3,700 veces (Google Scholar). Ha participado en más de 50 proyectos de investigación con financiamiento del sector público y privado. Cuenta con 2 patentes otorgadas. Ha impartido cátedra en licenciatura y posgrado por más de 30 años. Es tutor de doctorado en el Programa de Maestría y Doctorado en Ingeniería y en el Programa de Posgrado de Ciencia e Ingeniería de la Computación. Bajo su dirección se han titulado 35 estudiantes de licenciatura y han obtenido el grado de maestría 35 estudiantes y 12 el de doctorado. Dirige grupos de investigación en control de vibraciones, sistemas de propulsión y almacenamiento híbridos, control de tráfico y control de procesos de gasificación. Sus líneas de investigación están relacionadas con el Control Automático donde investiga su aplicación en la detección y mitigación de daño en edificios, sistemas de almacenamiento y propulsión híbridos, tráfico vehicular y gasificación. Sus aportaciones se han referido principalmente al modelado, estimación y control en sistemas dinámicos no lineales con incertidumbre paramétrica e información incompleta.
Modelado, Estimación y Control de Procesos Termoquímicos para Aprovechamiento de la Biomasa
9 de octubre de 2024, 3:00 p.m.
Auditorio Bernardo Quintana
La biomasa es un recurso renovable abundante que no es aprovechado apropiadamente. La noción de economía circular considera que su aprovechamiento es indispensable, Sin embargo, actualmente la contribución de la biomasa como fuente de energía se limita a su uso como combustible en forma de madera o carbón y tiene un rol minoritario en la matriz energética de nuestro país. En las grandes urbes, como la Ciudad de México, se produce una cantidad muy importante de residuos municipales. De ellos, un porcentaje significativo (del orden del 40 %) corresponde a residuos orgánicos de algún tipo. El aprovechamiento de la biomasa utiliza dos tipos de procesos: biológicos y termoquímicos. Los primeros se basan en la acción de microorganismos para la descomposición de la materia orgánica en productos útiles, principalmente biogás. Los segundos logran la descomposición de la biomasa en condiciones de presión y temperatura que inducen el rompimiento de las estructuras moleculares complejas que la componen.
Se describirán dos procesos termoquímicos que hemos estudiado con detalle: gasificación y carbonización hidrotermal. El primero es útil para procesar materia orgánica con bajos contenidos de humedad ( 25 % máximo) y tiene como producto principal el llamado gas de síntesis. El segundo es útil para materia orgánica con alto contenido de humedad y que produce hidrocarbón, un producto similar al carbón fósil en términos de poder calórico. El énfasis de la charla estará en la descripción de los modelos matemáticos correspondientes y de su comportamiento dinámico para describir los patrones de los puntos de equilibrio a través de un análisis de bifurcación que toma como base los parámetros más relevantes. Se presentarán también algunos esquemas de estimación y observación diseñados para ambos procesos. Finalmente, se describirá una planta piloto que se construyó para el tratamiento de residuos orgánicos en la Ciudad de México, con capacidad para tratar cada día 72 y 25 toneladas de materia orgánica húmeda y seca, respectivamente. La planta está en etapa de licenciamiento y se espera que entre en operación en próximas fechas.

Dr. Víctor Adrián Santibáñez Dávila
Instituto Tecnológico de la Laguna
Víctor Adrián es Doctor en Ciencias en Electrónica y Telecomunicaciones (1997) por parte del Centro de Investigación Científica y de Educación Superior de Ensenada CICESE, Maestro en Ciencias en Ingeniería Eléctrica (1981) e Ingeniero Industrial en Electrónica (1976), por parte del Instituto Tecnológico de La Laguna. Actualmente, es Profesor Investigador del Instituto Tecnológico de la Laguna (desde 1982), donde a la fecha tiene el Reconocimiento en el Desempeño Docente Nivel VI del Tecnológico Nacional de México. Además, tiene el reconocimiento por el SNII como Investigador Nacional Nivel III del 1 de enero de 2020 a 31 de diciembre de 2034. También es reconocido por PROMEP como Profesor con Perfil Deseable. Es líder del Cuerpo Académico Consolidado de Mecatrónica y Control de PROMEP-SEP-ANUIES.
Su productividad científica a partir de 1995 se resume en lo siguiente: Es autor/coautor de dos libros publicados y editados internacionalmente por Springer y Pearson Prentice Hall, de ciento un artículos en revistas internacionales indexadas por ISI-JCR, de siete artículos en revistas arbitradas, de seis capítulos de libros editados internacionalmente, de sesenta y ocho artículos en memorias de congresos internacionales y ciento tres en congresos nacionales. Ha graduado a cuarenta y cinco estudiantes de maestría y quince de doctorado. Ha sido Editor Asociado y Editor Invitado de 2 Revistas Internacionales reconocidas por el JCR (Journal Citation Report). Fue Presidente de la Asociación Mexicana de Robótica AMRob, de octubre de 2005 a octubre de 2007. Sus áreas de interés son: control de robots, control no lineal, control adaptable, control difuso y control de sistemas mecatrónicos.
Control Difuso Sectorial con Precompensación Neuronal Adaptable para Control de Seguimiento de Manipuladores Robóticos
10 de octubre de 2024, 10:00 a.m.
Auditorio Bernardo Quintana
En esta plática se presentará una arquitectura de control novedosa que emplea una red neuronal adaptable (NN) para precompensación y un controlador difuso sectorial en el lazo de retroalimentación aplicada al control de seguimiento de trayectorias de movimiento de robots manipuladores. Se presentará un recorrido histórico de la evolución del controlador difuso sectorial en la aplicación de robots manipuladores haciendo énfasis en las propiedades pasivas originales del bloque de control difuso, que permitieron formalizar analíticamente su aplicación en manipuladores, tanto en regulación como en seguimiento. Se continuará con la introducción de nuevas propiedades del bloque difuso sectorial, útiles para generar funciones estrictas de Lyapunov que nos permiten garantizar el cumplimiento del objetivo de control de seguimiento de controladores difusos sectoriales con precompensación. Lo anterior nos conduce a ser capaces de introducir la nueva estructura de Control Difuso Sectorial SFC con Precompensación Neuronal Adaptable, cuyo análisis garantiza el cumplimiento del objetivo de control de seguimiento y estados acotados sin necesidad de depender del conocimiento de los parámetros ni estructura del modelo para su diseño e implementación en tiempo real.
Tanto los resultados de la simulación como los experimentales se presentan en comparación con el controlador clásico original Proporcional-Derivativo (PD) más precompensación, del cual, esta nueva propuesta es una evolución, y con dos versiones preliminares de la aplicación del control difuso sectorial con precompensación y el control PD no lineal con precompensación neuronal adaptable para seguimiento de trayectorias de un robot manipulador de dos grados de libertad (2-DOF). El controlador propuesto tiene, en general, mejor desempeño que sus contrapartes en términos de respuesta transitoria y en error de estado estacionario, mientras mantiene su tolerancia a la desviación de parámetros, una de las principales características de los controladores difusos, y excluye la necesidad de un modelo exacto del manipulador para lograr excelentes resultados.
Dr. Steven Brunton
Universidad de Washington
Steven Brunton es Profesor de Ingeniería Mecánica en la Universidad de Washington. También es Profesor Adjunto de Matemáticas Aplicadas e Informática, y Fellow en Ciencia de Datos en el Instituto eScience. Steve obtuvo su licenciatura en matemáticas en Caltech en 2006 y su doctorado en ingeniería mecánica y aeroespacial en Princeton en 2012. La investigación del Dr. Brunton se centra en combinar técnicas de reducción de dimensionalidad, sensado disperso y aprendizaje automático para el descubrimiento y control de sistemas dinámicos complejos basados en datos. También está interesado en cómo los patrones coherentes de bajo rango que subyacen en datos de alta dimensionalidad facilitan las mediciones dispersas y la colocación óptima de sensores y actuadores para el control. Está desarrollando controladores adaptativos en un contexto libre de ecuaciones utilizando aprendizaje automático. Aplicaciones específicas en dinámica de fluidos incluyen el control de turbulencia en bucle cerrado para mejorar la mezcla, la biolocomoción y la energía renovable. Otras aplicaciones incluyen la neurociencia, el análisis de datos médicos, sistemas dinámicos en red y sistemas ópticos. Ha recibido los premios del Programa de Jóvenes Investigadores del Ejército y la Fuerza Aérea (YIP) y el Premio Presidencial al Inicio de Carrera para Científicos e Ingenieros (PECASE). Steve también es apasionado de la enseñanza de matemáticas a ingenieros, coautor de tres libros de texto y creador de un popular canal de YouTube bajo el seudónimo “eigensteve”.
Machine Learning for Sparse Nonlinear Modeling and Control
10 de octubre de 2024, 3:00 p.m.
Auditorio Bernardo Quintana
This work describes how machine learning may be used to develop accurate and efficient nonlinear dynamical systems models for complex natural and engineered systems. We explore the sparse identification of nonlinear dynamics (SINDy) algorithm, which identifies a minimal dynamical system model that balances model complexity with accuracy, avoiding overfitting. This approach tends to promote models that are interpretable and generalizable, capturing the essential “physics” of the system. We also discuss the importance of learning effective coordinate systems in which the dynamics may be expected to be sparse. This sparse modeling approach will be demonstrated on a range of challenging modeling problems, for example in fluid dynamics, and we will discuss how to incorporate these models into existing model-based control efforts.

HOTEL RITZ CENTRO HISTÓRICO


Tarifa especial en habitación sencilla o doble: $1,550.00.
Clave: Congreso Nacional de Control Automático 2024”. Para esta tarifa es necesario comunicarse telefónicamente con el hotel.
Teléfono para reservaciones: 55 51 30 01 60. Mencionar la clave para la tarifa especial
Página web: www.hotelritz.com.mx

![]()

